RoBoTeNa
ロボットサイトまとめアンテナ
★公式Twitter @robotena
★全日本マイコンカーラリー大会2020結果掲載中!
記事ランキング
後から読む一覧
RSS
マイコンカー
マイクロマウス・ロボトレース
ヒューマノイド
かわさき
レスキュー
NHK学生ロボコン
高専ロボコン
その他
1位:
十万石クラブのロボット製作日誌
IN:0 / OUT:0
181104jmcr北信越決勝(13秒37)
ジャパンマイコンカーラリー2018全国大会予選
2年連続10回目の全国大会出場!
RoboRAVE Kaga 2017(2日目)
「産学連携プログラミング教室」に参加
2位:
熊本大学ロボコン部(出場名:からくりサークル)
IN:0 / OUT:0
近況報告 NHK学生ロボコン本選
近況報告 NHK学生ロボコン2次審査結果
担当変わりました。
マイコンを頂きました
近況報告
3位:
メカニカルガール
IN:0 / OUT:0
ボイスコネクト2出展します
マーシャル・マキシマイザーの歌詞のDTM的解釈
等身大ロボット「足立レイ」のテキスト読み上げソフトを開発するプロジェクト(クラウドファンディング)始めました
足立レイの軽量なMMDモデルとVRMモデルできました&全力疾走のモーションキャプチャ
頭部の本格的な設計・モデリング&胴体1/1出力始めました(ブログ版)
4位:
Let’s ロボット - 二足歩行ロボットのコミュニティサイト
IN:0 / OUT:0
ブログ移転のお知らせ
暑中お見舞い申し上げます
平和記念日
ハコの日
ハッピーバースデーヴイストン
5位:
湘南工科大学 ロボット研究部(ブログ)
IN:0 / OUT:0
SITロボット研究部ブログ移行について
8月の大会
近況報告
駆動配分について
PID速度制御について
6位:
株式会社ロボテナ(公式トップページ)
IN:0 / OUT:0
マイコンカ-向けのラインセンサ-基板を開発中です。なるべく早く販売できるように致します。
業務日誌
7位:
ロボメカ工房 | 電気通信大学
IN:0 / OUT:0
お問い合わせ
リンク
各部隊の紹介
活動報告
小中学生ロボットアイデアコンテスト
8位:
ロボテナWiki
IN:0 / OUT:0
FlightController
MenuBar
MCR_Camera
FPV
DroneFrame
9位:
【 ロボットゆうえんち公式ブログ 】
IN:0 / OUT:0
パイプロボコン青森・秋田・岩手県大会!ご報告
パイプロボコン!埼玉県&山梨県大会!!ご報告
春休みイベントご報告!瀬戸蔵ロボット博!!
怒涛の春休みが無事終了!!!
ロボットゆうえんち in AEONモール富谷ご報告!
10位:
2018信州総文祭マイコンカーラリー大会
IN:0 / OUT:0
決勝とエキシビジョンの動画を掲載しました。本大会のペ-ジをご確認ください。
決勝とエキシビジョンの動画を掲載しました。 本大会のペ-ジ をご確認ください。
2018.9.26大会レポ-トを掲載しました。本大会のペ-ジをご確認ください。
2018.8.19技術交流会①講師の皆様のプレゼン資料を掲載しました。本大会のペ-ジをご確認ください。
2018.8.17出場マイコンカ-の写真を掲載しました。本大会のペ-ジをご確認ください。
ロボットの長期間活動のための地図結合
181104jmcr北信越決勝(13秒37)
十万石クラブのロボット製作日誌
近況報告 NHK学生ロボコン本選
熊本大学ロボコン部(出場名:からくりサークル)
ボイスコネクト2出展します
メカニカルガール
ブログ移転のお知らせ
Let’s ロボット - 二足歩行ロボットのコミュニティサイト
SITロボット研究部ブログ移行について
湘南工科大学 ロボット研究部(ブログ)
マイコンカ-向けのラインセンサ-基板を開発中です。なるべく早く販売できるように致します。
株式会社ロボテナ(公式トップページ)
お問い合わせ
ロボメカ工房 | 電気通信大学
FlightController
ロボテナWiki
パイプロボコン青森・秋田・岩手県大会!ご報告
【 ロボットゆうえんち公式ブログ 】
決勝とエキシビジョンの動画を掲載しました。本大会のペ-ジをご確認ください。
2018信州総文祭マイコンカーラリー大会
1800x3600mm程度の板の上にコ-ス
全日本マイコンカーラリー大会2019(公式)
3/28(土)にルネサスマイコンカ-ラリ-競技会&技術交流を開催します!詳しくはこちらをご覧ください。
ルネサスマイコンカーラリー競技大会(アーカイブ)
Error:Failedtogeneraterssfeedfrompage
Micom Car Rally NET(アーカイブ)
Error:Failedtogeneraterssfeedfrompage
WAS DO Laughing out loud
マイコンカーラリー近畿実行委員会
連絡用スペ-スです。荒らされるようなら消してください。
マイコンカーWiki
東海大学CHALLENGE CUP 2024 マイコンカーラリー熊本大会
MCRの旅
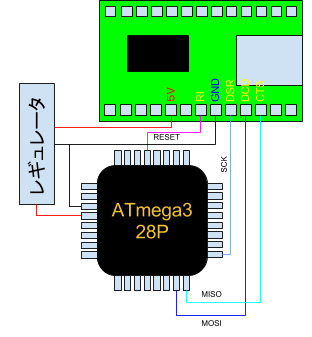
自作arduinoのあれこれ
Craft.AIRI
今年の大会について
TMCC
新構想
マイコンカーの「ド」素人が挫折するまでの日々
bluetooth ドライバを入れて イヤホンを使う
明日の設計図
7期生の作品
生産技術科の一日
ひさびさに
HMのMCR
大学祭終了!(10/10)
日進月歩
東京都大会
Silver Carbon MCR.
遠征~熊本・東海チャレンジカップ~
FORKの制作日記
【生存報告】終末のイゼッタの3話が面白い。
今日のポンコツさん
技術交流会結果!
生産者M
あ、やべっ(*´∀`)
まっすぅによるマイコンカーのブログ。
QuartusII 備忘録1
Eternal Destiny
ひとりごと
TAROの製作日記
明日は消防
マイコンカーの宣教師ザビエル
貰ってきましたbycaegnosimicdia(08/12)
活動記録ノート
子ヤギが来た!
ものづくり 楽しみ・苦しみ・喜び
集塵機づくり
K’sロボット工房
全国高校生ロボット競技大会2(アイデアロボット大会)
MMC07日記
MCR Univer sity Cup2013開催について
KAITラ技研ぶろぐ
MM2013ロボトレース競技で特別賞受賞しました!(動画有り)
ロボット製作日誌in神奈川
JMCR2020
GRV@MCR
マイコンカー2010年大会
●●珈琲
固定センサの制御
CMA-TUNED
祝 表彰台
尾張小牧のマイコンカー
近況報告
RMCR Tsubame 製作日記
Mac mini2012modelをSSD256GBとHDD1TB(7200rpm)でFusion Driveに。
ペンギンな日々
=新年度 始動=
Toshiのロボット開発記録
2017年01月01日
J’s Factory
仕事納め
能登半島最先端技術者
RMCR終わったね日記
Mつくり大学生の三日坊主な活動記録
no title
ENTER←[マイコンカー]
3年生を代表して感謝申し上げます。
進め!長工電気班
お知らせ:M-S1358Tピニオンギヤセット材質変更についてM-S1358Tピニオンギヤセットですが、メーカーの都合により従来の真鍮/プラスティック製からカーボン...
マイコンカーラリー販売 : 株式会社日立ドキュメントソリューションズ
開催要項開催要項
ジャパンマイコンカーラリー全国大会(公式HP)
画像処理用評価基板の作成
SCITECS_MCR日記
Error:Failedtogeneraterssfeedfrompage
Inside PIDream | 急げ!急げ!急げ!急げ!
ブログを移転しました
sora blog
▼ 2016/03/22(火) 熱田の森と新作構想 【 ロボトレ-ス 】 B3 Takayanagiです。 熱田の森大会に参加してきました! 結果は…… トレ-ス……2走目(加減速走行)...
ライントレース開発日誌
電通大プチコンおわり
SeaGateロボット研究室
2017年関西地区大会
エヌがのロボット製作日記
マイクロマウス2023(第44回全日本マイクロマウス大会)
第4実験室blog
近況
MouseLabo88
A:Mac合宿2019 無事閉幕
からくり工房A:Mac 第三のからくり工房
ブログ見に行くのに必ず広告が入るとか...
CPUを作ろう ~計算機教材とマイコンと電子工作~
Watzhdogの紹介動画および基板設計
楽しい趣味の理系
Fantom3rdの走行パラメータ
まついのまうす製作録
マイクロマウス2022
ぷーちん号との暮らし
2016忘年会
nishiki製作日誌
お知らせ一覧
RT MicroMouse
ろぼとれ日記
中部11月例会
ロボット工作研究室
趣味Eagle CADでプリント基板製造と部品実装への道 Vol.6
ブラザーの開発前線基地
オシロスコープ修理
こじまうす開発ノート
Error:Failedtogeneraterssfeedfrompage
NTF -New Technology Foundation- 公益財団法人ニューテクノロジー振興財団
その最後 ブログ新設
ロボボボいじりにうってつけの日
近況報告
ロボット製作日記
全日本大会行ってきました
s技研
Kariya Micro Maker Faire 2024 終了
アニキの極秘開発記
神戸・有馬温泉の旅
ロボコン日記
ぃょぃょ
兎小屋
第5回ニソコンVR
二足歩行ロボットエンターテインメント - ROBO-ONE
エントリ-クラス21台&スタンダ-ドクラス18台の闘いに。今回も、観客のみなさんが手に汗握る熱いバトルとなりました。。
2足歩行ロボットの競技会【姫路ロボ・チャレンジ】のホームページ
プラリペア届いた&試してみた
新・KRS-LAB/ウェブリブログ
きゅんどう@ksyundoAkeenmaker,programmerandanInstructablesauthor.apachearduinobeagleb...
ROBO LOG
2023年の総括
holypongのチャレンジ日記
いくま、ダンス部門で優勝!
naoko x robot
パソコンあれこれ...。
ロボット Cyclops 製作日記
姫路ロボ・チャレンジ ミニ 2014 告知!
JO-ZERO ROBOMASTER
●10月28-29日ロボファイト27開催(2023/09/21更新)2023年10月28日(土)と10月29日(日)にROBO-ONE認定大会「ロボファイト26」を開催いたします!会場は大阪市...
ROBOT FORCE
Nサーボの製作記録
必殺マイナーホビー
2017年新春インタビュー
キングカイザー応援ブログ!
ネコに仕える日々
ボクの夢はロボット博士
個人でミスミを利用することはできるのか?
HUED LAB.
22:34「弥生」生きてます。
まじかる☆マリオネット
Robot Japan 15thエントリー
Robot Japan
ワンダーフェスティバル2019[夏] を終えて
ふかふかバスケット
2017年の総括
UNDEЯ工房
ツクモロボット王国営業終了のお知らせ
ツクモロボット王国 - 店長ブログ
ラジオ848年越しスペシャルパート5!放送決定!
Radio848 ROBOぺ~じ支部
TexStudioのエラー対処
realteck 製作日記 第2章
Error:Failedtogeneraterssfeedfrompage
けせらせら
C-Styleからグラフ出力
熊工房 ohgumaの腹凹ませたい日記
振り返り2023年インデックス
散財さんの完全散財!
次期大同杯について
ロボ研日誌
CC-02 アッカーマン修正
Black Fantom
パイプロボコン青森・秋田・岩手県大会!ご報告
【 ロボットゆうえんち公式ブログ 】
2019終わるやんけ。
混沌日記 ~暫定版~
実験用ロボット
space
14mm逆ネジのピッチ
ロボット始めました。
久々に冬眠から復帰
気ままに気まぐれ 気分はいつもマニアック
長崎ハウステンボス認定大会
くぱぱ&くまま
いつもア-ルティロボットショップをご利用頂きありがとうございます。この度、Webショップのセキュリティ強化のためにシステムメンテナンスを実施いたします。メンテナンス期間中は当サイトが繋がりにくく...
お知らせ | RT Robot Shop Blog
4日目「新入生歓迎祭」
大産大ロボットプロジェクトなブログ。
7刊まで完了
ロビ 定期購読始めました
ワイ・エム・シートメタル 東大阪の町工場で生まれたものづくり体験キット
ロボメディア 2011
2023年のホビー活動まとめ
ゲームロボット/ゼムネス
すいませんROBOT GENERATION欠席します。orz
AZM LAB一時避難場所
ダンボットまじ便利
小型ロボット製作所 ~ Nano Robot Factory ~
ALGYAN 7周年基板IoT作品開発コンテスト 本番LT会!
ナッキィーのロボットガレージ
Vitis 2019.2 で QSPI Flashに書き込み失敗する問題について
FrostyDesign
とんかつ店開業の仕方教えます
トンカツ屋開業の塾です
ロボットの長期間活動のための地図結合
fuRo ---未来ロボット技術研究センター powered by ココログ
ブログ移行
山口自動機械 作業日誌
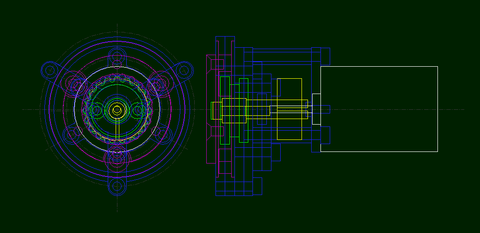
機体写真・設計図公開2023/09/13
かわさきロボット競技大会|かわロボ | ものづくり登竜門!
神奈川工科大学 かわさきバトルロボット in 幾徳祭
RRC’s Blog 神奈川工科大学 ロボット工学研究部 公式ブログ
ROBOTBATLE2018大会概要
都立高専ロボット研究部
新機構の開発って難しいね・・・
白い電気猫のゆるゆるブログ
1年ぶり・・・?
アクリルのかわロボ。
ダブルヘリカルギア(やまば歯車)のご紹介
sin1’s studio
今年も連休は海外で。
UE村工房作業日誌
搭乗型ロボットを造ってみた
佐藤ロボット研究所不定期日誌
CNCの防音BOX
白黒サイクル
「MISUMIpresents第42回ROBO-ONE」レポート
大阪電気通信大学 自由工房
ブログの移転について
近畿大学 産業理工学部 ロボット工作研究会
レスコン班現状報告
メカニカルサポートプロジェクト活動日誌
部室案内
六甲おろしブログ
新年度になりました。
信大ロボ研のブログ
Robohan推奨PC製品紹介
大阪大学Robohanブログ
2023年最後の更新かも
AQUA CRESCENT
残り30日
佐世保高専ロボコン部ネタ帖
テスト投稿
ロボハチ日記 ~八戸高専ロボコン日誌~
~プログラム班の徒然日記~その8
豊田高専ロボコンAチームblog
入部を考えている方へ
豊田高専ロボコンBチーム
湘南工科大学ロボット研究部(公式)
(株)愛和産業
Rescue Robot Contest(公式HP)
東京大学[東京都]RoboTech(ロボテック)
NHK学生ロボコン(公式HP)
【ご報告】前略、結婚しました。
思い立ったが吉日
menu
第5回福岡県マイコンカーラリー技術交流大会 兼 西工大杯マイコンカーラリー2019西日本大会
morph1&2photomorph1&2morph3photomorph3windphotoWINDRobotSystemhallucigeniaphotoHallucigen...
fuRo:ロボット紹介
等身大女性型ロボット運動能力テストその1です。テストとしてスクワットを連続で10回させてみました。安定した動きで特に問題はなさそうです。動画中のキャプションにあるように身長は約150cmで...
MARU Family
ポテンショメ-タ基板
ロボテナショップ
2019 RMCR夏 スピン、スピン、スピン、スピン!
ナゴヤっこテクノロジー
久々の更新!
音速のマイコンカー
サーボテスタをつかってみた
備忘録
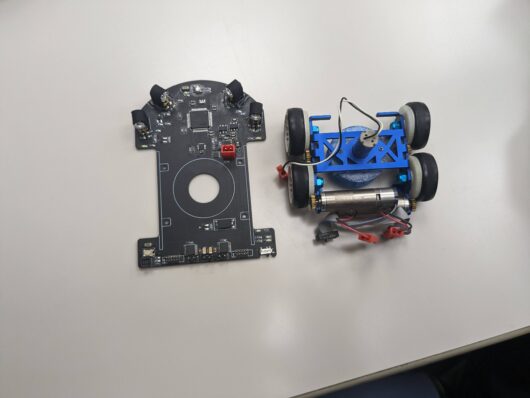
ボード準備R5.10.18
やまがたロボットクラブ
全日本学生大会の感想
sora lab
上へ